
Acrobat Robot
Project for MEAM510 - Design of Mechatronic Systems, 2013
University of Pennsylvania, Philadelphia, U.S.A.
SUMMARY
VIDEOS AVAILABLE BELOW!
Project made alongside Gaylord Swaby, Jay Davey and Francisco de Villalobos
In this project a balancing robot was made. The robot is naturally unstable, and its objective is to control itself to be stable and to not fall. We used a simple mechanical design which was easy to manufacture and debug, and was robust to falling in order to protect the electronic components. The system used a PID controller as well as a fuzzy logic controller.
Project for MEAM510 - Design of Mechatronic Systems, 2013
University of Pennsylvania, Philadelphia, U.S.A.
SUMMARY
VIDEOS AVAILABLE BELOW!
Project made alongside Gaylord Swaby, Jay Davey and Francisco de Villalobos
In this project a balancing robot was made. The robot is naturally unstable, and its objective is to control itself to be stable and to not fall. We used a simple mechanical design which was easy to manufacture and debug, and was robust to falling in order to protect the electronic components. The system used a PID controller as well as a fuzzy logic controller.
Detailed Explanation
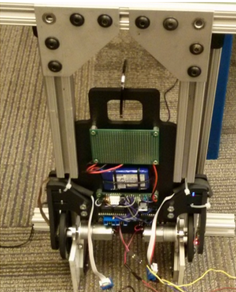
The balancing robot had a simple mechanical design which facilitated handling, the mounting of electrical components, and protecttion of such components from falls during the development cycle of the project (not shown).
The system had an M2 as a MCU, an Invensense MPU6050 3-axis accelerometer and 3 axis rate axis gyro and a 7.6V LiPo battery. The structure is 1/4 inch ABS cut in a laser cutter. All the electronics where soldered in a prototyping double-sided PCB board.
Project made alongside Gaylord Swaby, Jay Davey and Francisco de Villalobos
The system had an M2 as a MCU, an Invensense MPU6050 3-axis accelerometer and 3 axis rate axis gyro and a 7.6V LiPo battery. The structure is 1/4 inch ABS cut in a laser cutter. All the electronics where soldered in a prototyping double-sided PCB board.
Project made alongside Gaylord Swaby, Jay Davey and Francisco de Villalobos
