Golfer Robot
Project for MEAM510 - Design of Mechatronic Systems, 2013
University of Pennsylvania, Philadelphia, U.S.A.
SUMMARY
VIDEOS AVAILABLE BELOW!
In this project a mobile robot was built to kick a golf ball towards a flag, with the objective of hitting the flag or kicking the golf ball as close as possible to the flag.
The flag was a rotating IR light (similar to a lighthouse). The robot was set at a random location in an astroturf field, with the flag set also at a random location and at a distance of 30[cm] to 180[cm] from the robot. The robot had to find the flag, calculate distance and kick the golf ball in an effort to hit the flag.
Project for MEAM510 - Design of Mechatronic Systems, 2013
University of Pennsylvania, Philadelphia, U.S.A.
SUMMARY
VIDEOS AVAILABLE BELOW!
In this project a mobile robot was built to kick a golf ball towards a flag, with the objective of hitting the flag or kicking the golf ball as close as possible to the flag.
The flag was a rotating IR light (similar to a lighthouse). The robot was set at a random location in an astroturf field, with the flag set also at a random location and at a distance of 30[cm] to 180[cm] from the robot. The robot had to find the flag, calculate distance and kick the golf ball in an effort to hit the flag.
Detailed Explanation
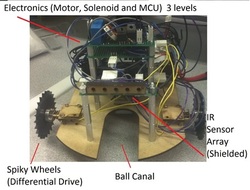
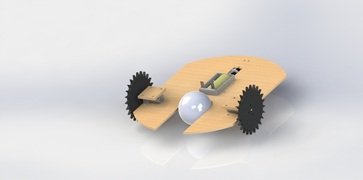
In this project a golfer robot was made. The robot's objective is to kick a golf ball towards a flag, which has an IR light rotating on its tip, similar to a lighthouse. The workspace was a 2[m]x2[m] Astroturf field. The robot and the flag where positioned each shot at a random configuration at a distance of 30[cm] up to 180[cm] from each other. The golfer robot used a solenoid in order to kick the ball.
The robot had an array of five IR sensors to search for the flag. One of the challenges to overcome was that since the IR light was rotating, there are times when the robot does not have any incoming information in which to act to. Also, the rotation of the light gave the robot different values of light values on its sensors, so the robot must also adapt to varying values of light.
Once the robot found the flag and was positioned to make a shot, it calculated the distance from the robot to the flag and made a shot according to said distance. The impact force made on the golf ball by the solenoid was controlled by the time the current was allowed to pass through the solenoid.
Spiky wheels were used in a differential drive configuration in order to transverse the Astroturf terrain.
This project was made alongside Gaylord Swaby.
The robot had an array of five IR sensors to search for the flag. One of the challenges to overcome was that since the IR light was rotating, there are times when the robot does not have any incoming information in which to act to. Also, the rotation of the light gave the robot different values of light values on its sensors, so the robot must also adapt to varying values of light.
Once the robot found the flag and was positioned to make a shot, it calculated the distance from the robot to the flag and made a shot according to said distance. The impact force made on the golf ball by the solenoid was controlled by the time the current was allowed to pass through the solenoid.
Spiky wheels were used in a differential drive configuration in order to transverse the Astroturf terrain.
This project was made alongside Gaylord Swaby.
