Labyrinth Robot
Short Project for MEAM510 - Design of Mechatronic Systems, 2013
University of Pennsylvania, Philadelphia, U.S.A.
SUMMARY
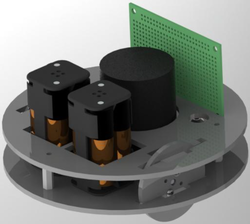
In this project a small mobile robot was designed and implemented with the objective of transversing a maze carrying a 500-gram payload. The robot was designed from the ground up. The mechanical system was designed in SolidWorks, and was made on a laser cutter on smoke-color acrylic. All the electronics were designed and soldered on a prototype double-sided PCB board. The robot was controlled with a joystick and used the M2 MCU for such control. This project was part of a 1 week project of "Design of Mechatronic Systems" at the University of Pennsilvania.
Short Project for MEAM510 - Design of Mechatronic Systems, 2013
University of Pennsylvania, Philadelphia, U.S.A.
SUMMARY
In this project a small mobile robot was designed and implemented with the objective of transversing a maze carrying a 500-gram payload. The robot was designed from the ground up. The mechanical system was designed in SolidWorks, and was made on a laser cutter on smoke-color acrylic. All the electronics were designed and soldered on a prototype double-sided PCB board. The robot was controlled with a joystick and used the M2 MCU for such control. This project was part of a 1 week project of "Design of Mechatronic Systems" at the University of Pennsilvania.
