Robotic Arm (PUMA 260 Projects)
Project for MEAM520 - Introduction to Robotics, 2013
University of Pennsylvania, Philadelphia, U.S.A.
SUMMARY
VIDEOS AVAILABLE BELOW!
In these projects, a robotic arm (the PUMA 260) was used to perform two tasks which needed a different strategy of motion: Foward Kinematics and Reverse Kinematics.
The first project was a robot dancing performance. The robot danced to a salsa music, and the choreography was designed specifying the joint angles at each frame using the forward kinematics of the robotic arm. Matlab was used to simulate the dance and to control the robotic arm.
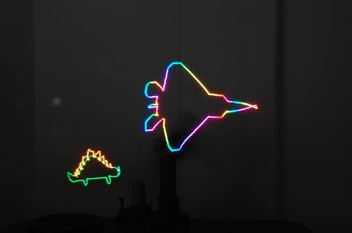
The second project was a painting made by the robotic arm. The robot had an RGB LED connected to its end effector. A camera was set at a long-exposure mode to capture the painting. Inverse Kinematics of the Puma Robot were calculated and used to draw the picture to the left in a 2D plane. Matlab was used to control the robotic arm.
Project for MEAM520 - Introduction to Robotics, 2013
University of Pennsylvania, Philadelphia, U.S.A.
SUMMARY
VIDEOS AVAILABLE BELOW!
In these projects, a robotic arm (the PUMA 260) was used to perform two tasks which needed a different strategy of motion: Foward Kinematics and Reverse Kinematics.
The first project was a robot dancing performance. The robot danced to a salsa music, and the choreography was designed specifying the joint angles at each frame using the forward kinematics of the robotic arm. Matlab was used to simulate the dance and to control the robotic arm.
The second project was a painting made by the robotic arm. The robot had an RGB LED connected to its end effector. A camera was set at a long-exposure mode to capture the painting. Inverse Kinematics of the Puma Robot were calculated and used to draw the picture to the left in a 2D plane. Matlab was used to control the robotic arm.
Inverse Kinematics - Drawing

Drawing of a Dinasour and an F-22 plane. Project made alongside Sarah Leungh and Gaylord Swaby.
Robotic Dance - Foward Kinematics
The above video shows the simulation of the dance. The upper graph shows the waveform of the music, with the vertical black lines shows the different positions of the robotic arm. The transition between poses are calculated with different trajectory planning strategies such as cubic and quintic polynomials as well as linear segments with parabolic blends (LSPB). I made this project alongside Gaylord Swaby.
The video below shows the dance made on the PUMA260. Its movements had to be scaled due to mechanical errors encountered on the filming day, so the dance shown below has less movement than the one above (the simulation).
The video below shows the dance made on the PUMA260. Its movements had to be scaled due to mechanical errors encountered on the filming day, so the dance shown below has less movement than the one above (the simulation).
