Robockey 2013
Project for MEAM510 - Design of Mechatronic Systems, 2013
University of Pennsylvania, Philadelphia, U.S.A.
SUMMARY
VIDEOS LINKS AVAILABLE BELOW!
Project made alongside Gaylord Swaby, Jay Davey and Francisco de Villalobos
Special thanks to Tarik Tosun
Learn more about Robockey here! Details and rules are here!
In this project, teams competed in a two one-minute session hockey matches with three mobile autonomous robots. The robots must control the IR-emitting puck and score in the opponent's goal while they defend their own goal! The robots are fully autonomous and communicated among themselves to cooperate and win the match.
Our robot team, called "Double Trouble", was composed of two midfielders and a goalie robot which defended our goal. The two midfielders could join together with magnets to form a super-robot, while our goalie had 13 IR sensors to be able to "see" the puck and defend our goal effectively.
Project for MEAM510 - Design of Mechatronic Systems, 2013
University of Pennsylvania, Philadelphia, U.S.A.
SUMMARY
VIDEOS LINKS AVAILABLE BELOW!
Project made alongside Gaylord Swaby, Jay Davey and Francisco de Villalobos
Special thanks to Tarik Tosun
Learn more about Robockey here! Details and rules are here!
In this project, teams competed in a two one-minute session hockey matches with three mobile autonomous robots. The robots must control the IR-emitting puck and score in the opponent's goal while they defend their own goal! The robots are fully autonomous and communicated among themselves to cooperate and win the match.
Our robot team, called "Double Trouble", was composed of two midfielders and a goalie robot which defended our goal. The two midfielders could join together with magnets to form a super-robot, while our goalie had 13 IR sensors to be able to "see" the puck and defend our goal effectively.
Detailed Explanation

Midfielders joining to form a bigger robot!
Midfielders
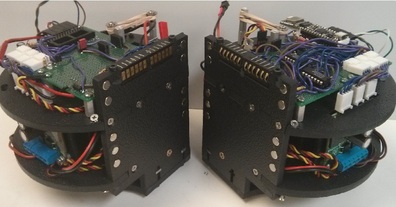
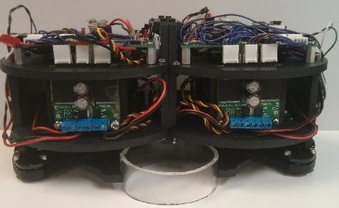
The midfielders had a very interesting design: they could act independently, but they could join into a bigger, stronger robot and control itself as one, with more sensors and more motor power. Each robot had a surface with magnets whose polarity was such that it would assemble with its partner when they are close together enough. The robots had also some brush blocks which allowed electrical communication between the robots when they were joined.
When the robots were joined, only one MCU controlled both robots. The robots could detect when they were connected, and when a connection was made the control of the motors on the slave robot was given to the master robot. The circuits used tri-state buffer as logic gates to decide when the motors on the slave robot heard its commands from the master robot through the connections on the brush block.
When connected, the robots could work as a team to control the puck while complying with the rules regarding the covering of the puck. When both robots charged to the opponent's goal, they were a force to be reckoned with! One strategy we used is to rotate the robots in place with the puck to deflect and move the opponents' robots on an effort to confuse them and score.
The midfielders had a very interesting design: they could act independently, but they could join into a bigger, stronger robot and control itself as one, with more sensors and more motor power. Each robot had a surface with magnets whose polarity was such that it would assemble with its partner when they are close together enough. The robots had also some brush blocks which allowed electrical communication between the robots when they were joined.
When the robots were joined, only one MCU controlled both robots. The robots could detect when they were connected, and when a connection was made the control of the motors on the slave robot was given to the master robot. The circuits used tri-state buffer as logic gates to decide when the motors on the slave robot heard its commands from the master robot through the connections on the brush block.
When connected, the robots could work as a team to control the puck while complying with the rules regarding the covering of the puck. When both robots charged to the opponent's goal, they were a force to be reckoned with! One strategy we used is to rotate the robots in place with the puck to deflect and move the opponents' robots on an effort to confuse them and score.
Goalie
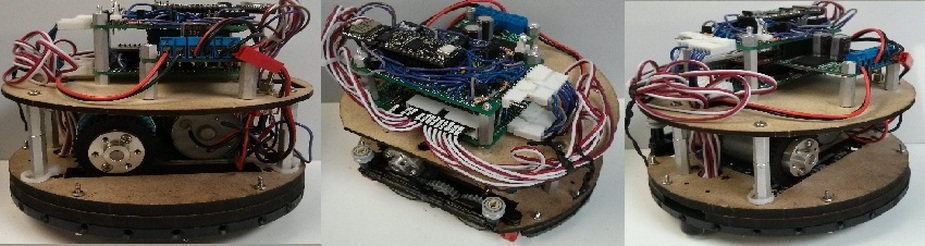
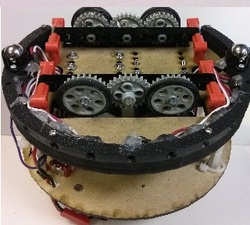
Our goalie was designed to stay on the wall of our goal, and to detect clearly the position of the IR-emitting puck when it was in range. It counted with 13 IR sensors spaced evenly in the robot, and it had a differential drive gear train for movement. An all-out bruiser, our goalie had the power to stop the offensive from one or two robots charging to our goal! It also managed to score some goals by taking the puck and sliding with it alongside the ring all the way to the opponent's goal, earning the robot the nickname "El Loco".
Our goalie was designed to stay on the wall of our goal, and to detect clearly the position of the IR-emitting puck when it was in range. It counted with 13 IR sensors spaced evenly in the robot, and it had a differential drive gear train for movement. An all-out bruiser, our goalie had the power to stop the offensive from one or two robots charging to our goal! It also managed to score some goals by taking the puck and sliding with it alongside the ring all the way to the opponent's goal, earning the robot the nickname "El Loco".
VIDEO LINKS
You can watch all the matches from the 2013 Robockey cup here. We are team # 10! I will try to cut the matches from our team and put the videos here.
