
Swarm Robotics Prototype Robot
B.S., Mechanical Engineering Thesis, 2010
Universidad de los Andes, Bogotá, Colombia
Summary
The focus of this project was to design and build an ultra-low-cost robot prototype that could be used as a platform to implement and study swarm behaviors, like those seen in ants. The project was made with electronics components available in the Colombian market. Six Prototype robots were build which moved with vibrating motors and toothbrushes. They could communicate between nearby robots via IR Light, and could sense and emit light gradients to communicate among themselves.
B.S., Mechanical Engineering Thesis, 2010
Universidad de los Andes, Bogotá, Colombia
Summary
The focus of this project was to design and build an ultra-low-cost robot prototype that could be used as a platform to implement and study swarm behaviors, like those seen in ants. The project was made with electronics components available in the Colombian market. Six Prototype robots were build which moved with vibrating motors and toothbrushes. They could communicate between nearby robots via IR Light, and could sense and emit light gradients to communicate among themselves.
Detailed Explanation

This project built six ultra-low
cost robotic prototype for use in Swarm Robotics. It was particularly aimed at
emulation behaviors seen in ants, where communication between local agents and
between the agents and the environment (stimergy) are vital to the emergence of
a global behavior in the group. I was in charge of all aspects in this project,
from brainstorming and designing up to managing costs, soldering, manufacturing,
programming and testing.
The robots were designed to be:
The robots were designed to be:
- Affordable: Low-cost of the robot’s components.
- Ease of Manufacturability: Easy to construct and
assemble, with little tools necessary.
- Scalability: It is designed to be able to scale production to 10~50 for initial prototypes.
- Availability: Designed for available products on the Colombian Electronics Market.
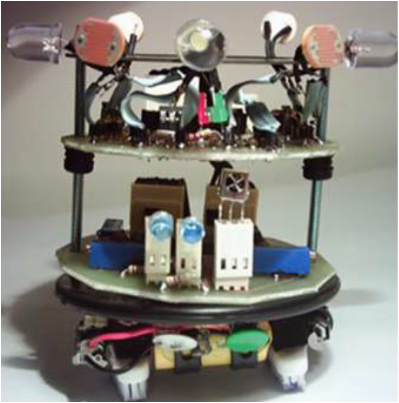
Locomotion: Differential "Bristle Robot". Vibrating motors with toothbrushes
Battery: 3.6V 300mA DC Phone Battery
MCU: Microchip PIC 8 Bit (PIC16F628A)
Digital communication: IR emitters and 38kHz TV IR receiver. The robots used a protocol from Daewoo TVs to communicate between them. The user could give global commands to the robots via a Daewoo TV controller.
Structure: Wood, O-Rings

The robots used also LEDs and Photoresistors (LDR) to communicate between robots with a signal that could act as a “gradient”. The objective of this was to emulate the signal common from swarms in nature, which act in a positive feedback mode (the stronger the stimulus, the stronger is the need to reinforce the behavior). For example, if the robots were programmed to follow light to cluster themselves in a group, the signal the robots generated to call other robots would get stronger as each robot joins the group and illuminates its LEDs.

With their on-board IR emitters and a TV remote control IR receiver (TSOP1838) the robots could send digital commands between themselves. Also, a user could send a global message to the robots via a Daewoo TV remote control.
The six robots were programmed to do simple algorithms (e.g., message propagation, clustering) . VIDEOS COMING SOON!
